合肥学院专区
基本信息
- 作品名称:
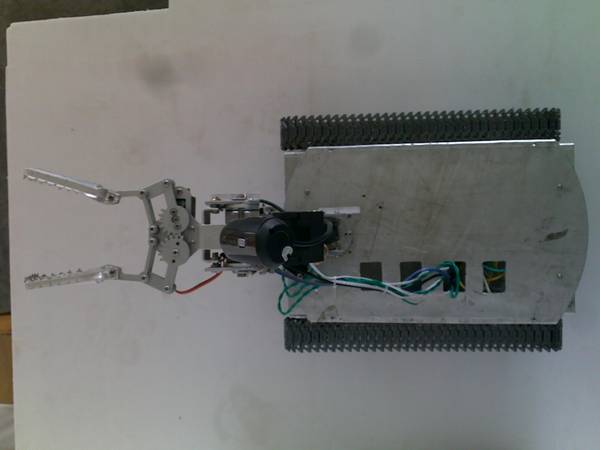
- 基于视觉伺服控制的智能机器人设计与实现
- 大类:
- 科技发明制作B类
- 小类:
- 信息技术
- 简介:
运用机器视觉技术,对目标体的进行学习,建立目标体的多元目标特征库,机器人自动搜索目标并实现对目标体的操作,其研究内容涉及图像处理、机器视觉、控制理论、机器人学、运动学、动力学等多个学科领域,具有极大的挑战性。
设计的基于视觉伺服控制的智能机器人,可广泛运用于静止、运动目标体的自动跟踪和识别场合,如:危险品自主搜索的排爆机器人、成熟果蔬识别采摘机器人,也可作为机器人控制的实验教学工具。- 详细介绍:
本系统根据视觉伺服控制理论,在自主设计的机器人机械结构基础上,通过对目标模型学习以构建目标特征库;设计匹配算法,对提取的目标特征值与目标特征库的特征值进行匹配,完成目标的空间定位;根据方位确定算法,确定机器人运动控制参数;按照运动控制算法,控制机器人完成目标体的抓取。
采用双微处理器控制系统,以基于ARM920T内核的32位微处理器S3C2440A作为主控制器、Linux操作系统为软件平台,完成目标特征库的建立、图像匹配的实现、目标体空间坐标的确定功能;以8位微处理器C8051F120为运动控制器,通过UART接口,接受目标体空间定位参数,完成机器人的运动控制功能,实现对目标体的抓取。系统通过测试,实现了对已学习目标体的搜索和抓取功能,具有广阔的应用前景。本系统可拓展实现基于Internet网络的数据传输和遥控功能,其发展空间更为广泛。- 获奖情况:
第十二届“挑战杯”省赛作品 省赛三等奖
2011年5月在合肥学院挑战杯课外学术作品展示